Demo Video
Rapidly exploring random trees (RRT) is a path planning algorithm originally published in 1998 by Steven M. LaValle. This is an implementation of the RRT algorithm both in an obstacle-free and an obstacle-filled environment.
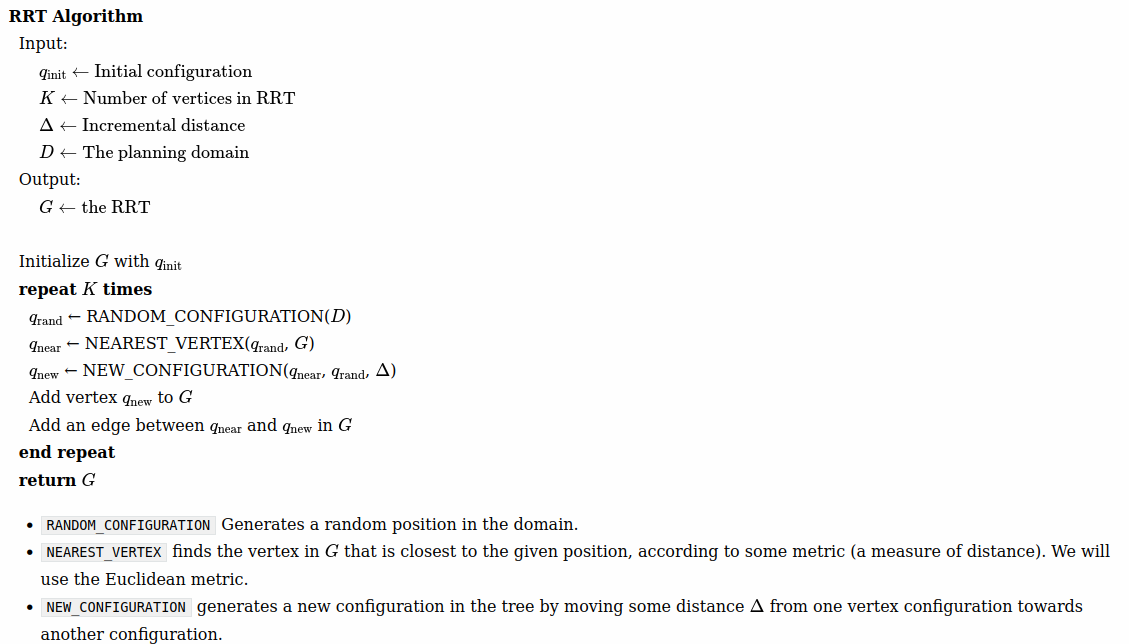
Pseudo Code
The pseudo code of the algorithm can be described as shown:
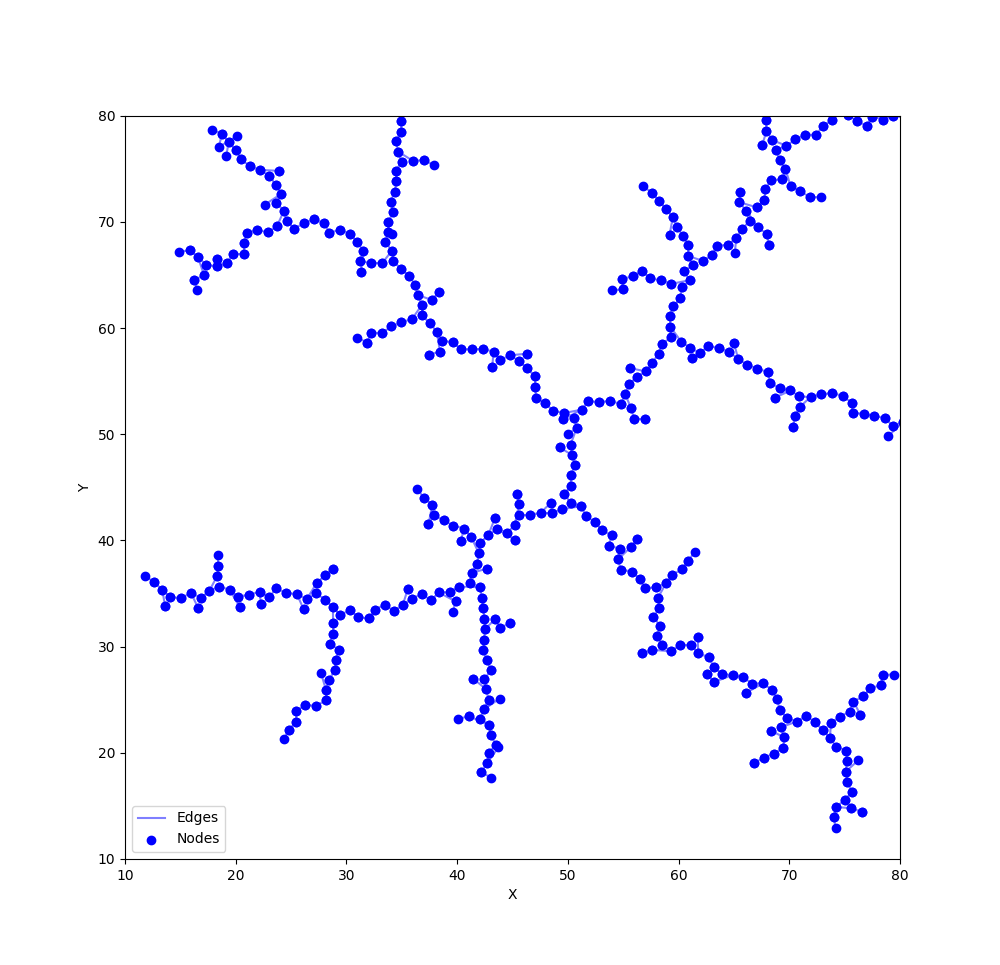
Results
In the obstacle-free environment, 500 iterations of RRT give almost uniform coverage throughout the space.
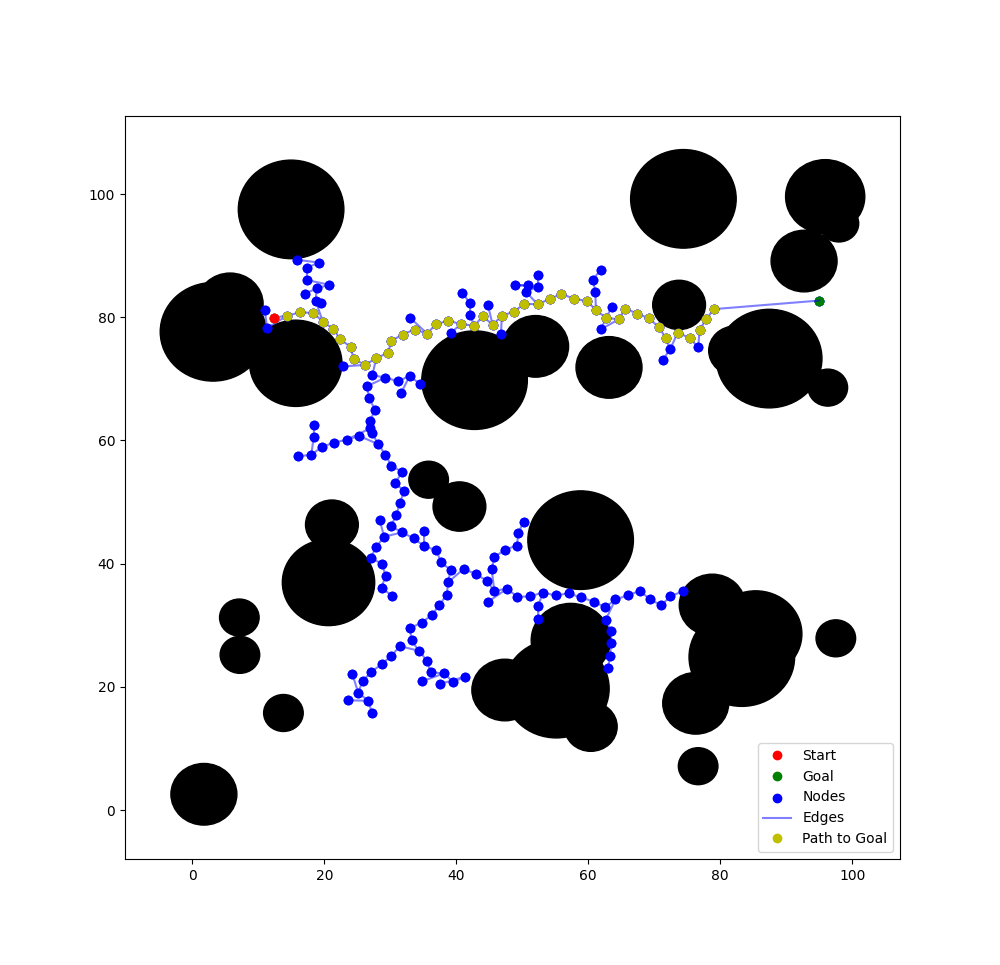
In the obstacle-filled environment, the RRT algorithm is used to find the path from a start position to a goal position. The shortest path from the start to goal is indicated in yellow.
Reference
This implementation was a part of a challenge during the NU MSR hackathon. More details can be found here: https://nu-msr.github.io/hackathon/rrt_challenge.html